
MagneBike: Compact Magnetic Wheeled Robot for Power Plant Inspection. Intresting - u CAT, Centre for Biorobotics. Sellafield completes initial mapping of First Generation Magnox Storage Ponds using off-the-shelf ROV's » Nuclear Decommissioning Report. Sellafield Ltd has successfully used a mini submarine or more correctly a Remotely Operated Vehicle (ROV) to survey the contents of one of the historic fuel storage ponds.

The First Generation Magnox Storage Pond (FGMSP) has been surveyed thanks to the development and operation of two underwater ROVs. Pluto Plus. Bluetooth joins sub for decommissioning. A mini-submarine with wireless connectivity is being used to transmit live data on conditions in a legacy fuel storage pond at the UK's Sellafield site.

The company says this is a first for its decommissioning program. The mini-sub is one of the first of a fleet of remotely operated vehicles (ROVs) supporting decommissioning at the site, where it is being used to retrieve data on liquor conditions and to monitor visibility in the First Generation Magnox Storage Pond. The pond, which dates back to the 1950s, contains used nuclear fuel, radioactive sludges, miscellaneous nuclear wastes and fuel containers and presents complex decommissioning challenges. The mini-sub deploys a probe which can sample up to seven different variables at any one time. Robot inspects primary system at US unit. A search for flaws deep in the heart of Surry reactor - ROVworld Subsea Information. SURRY — Deep inside the water-filled nuclear reactor, a robotic inspector poked its sensor-tipped arm into a pipe to scan for cracks thinner than a human hair.

Meanwhile, a tiny remote-controlled submarine left its post in the reactor and rose to the surface, its headlights glowing like the eyes of a sea creature. In a trailer about 100 feet outside the reactor building, engineers watched computer screens as they adjusted the robotic arm, moving it by fractions of an inch and crunching the streams of data it collected. These tools step in for humans in the dangerous environment of a nuclear reactor, and they find flaws that the human eye could not. They are among the instruments of the 21st century that Dominion Resources Inc. uses to run and maintain the 32-year-old Surry Nuclear Power Station. The nuclear power industry has combined human experience and high technology to reach an era of relative safety 25 years after the accident at the Three Mile Island plant in Pennsylvania.
VideoRay Underwater Remotely Operated Vehicles - ROV. Remotely Operated Vehicle Committee of the Marine Technology Society. Products — GNOM. Super GNOM The most advanced model Super Gnom can be equipped with the grabber, scan sector sonar (Micron Tritech or similar) and USBL positioning system.

More powerful thrusters and additional illumination installed on the Super Gnom expand range of vehicle applications. GNOM Standard The Gnom Standard is a basic model of compact ROVs Gnom. It has small size, thin umbilical cable and very high manoeuvring capability which allows operating in hard-to-reach places including inside sunken wrecks.
GNOM Baby The ROV Gnom Baby is a really micro sized vehicle that has all main features inherited from larger underwater systems. Panoramic Dcam The panoramic drop videosystem with a review angle 360 ⁰ is developed. Drop Camera Underwater drop camera system is a high-resolution, color or B/W waterproof camera, with standard or a wide view angle. DEKRA Nuclear Presentation 2011-05-09. Remotely operated underwater vehicle. ROV at work in an underwater oil and gas field.
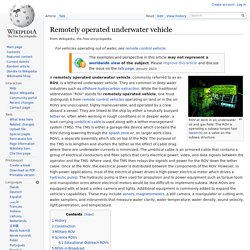
The ROV is operating a subsea torque tool (wrench) on a valve on the subsea structure. History[edit] A Royal Navy ROV (Cutlet) first used in the 1950s to retrieve practice torpedoes and mines In the 1970s and '80s the Royal Navy used "Cutlet", a remotely operated submersible, to recover practice torpedoes and mines. RCA (Noise) maintained the "Cutlet 02" System based at BUTEC ranges, whilst the "03" system was based at the submarine base on the Clyde and was operated and maintained by RN personnel. While the oil and gas industry uses the majority of ROVs, other applications include science, military, and salvage. Construction[edit] Work-class ROVs are built with a large flotation pack on top of an aluminium chassis to provide the necessary buoyancy to perform a variety of tasks.
The majority of the work-class ROVs are built as described above; however, this is not the only style in ROV building method. Military ROV[edit] Science ROVs[edit] MIROV2MANUAL.pdf. Homebuilt Rovs. I always design my Rov with hollow skids so I have someplace to easily to add weight.
I like to use lead shot, BB's or washers, anything along those lines so its easy to adjust the weight. On my Seafox I used washers threaded onto a dowel and just stuff them in the hollow skids. I always bring spares with me on dives incase I need to adjust the buoyancy in the field. The biggest question I get is "How do you know how much to add? " You could figure out displacement, weight, mass and all that fun stuff but I take the easy way out.