
9DOF MPU 9150 3 Axis Gyroscope Accelerometer Magnetic Field Replace MPU 6050. ArduIMUV4 - ardu-imu - Arduino based IMU & AHRS. Like its predecessor, ArduIMU V4 is an Inertial Measure Unit plus an Arduino-compatible processor that can run on an Attitude Heading Reference System (AHRS) code based on Mahony’s DCM filter algorithm with Madgwick’s magnetic distortion compensation.

In addition to the 3-axis gyro sensors, accelerometers & magnetometers and GPS port, the hardware now includes a dynamic analog temperature sensor, ambient light sensor and pressure sensor. The microprocessor is an ATMEGA128RFA1 at 16 MHz that has 128KB of self-programmable flash and 4KB of EEPROM and the ability to transmit or receive data at 2.4 GHz ISM band. ArduIMU V4 features the latest MPU-9150 that includes a 3-axis gyroscopes, accelerometers and magnetometers and uses I²C for optimal implementation. Important Note: ArduIMU is not an Autopilot. Note: ArduIMU V4 is in development and will be available very soon. MPU-9150 9-axis accelerometer/gyroscope/magnetometer. Www.drotek.fr - MPU9150 Invensense (gyro + accelerometre + magnetometre)
Tutorial - Razor AHRS - Q&U Lab Project Hosting. FreeIMU: an Open Hardware Framework for Orientation and Motion Sensing. FreeIMU is an ongoing research project which aims to design Open Hardware 9/10 DOM/DOF Inertial Measurement Units as well as easy to use Orientation and Motion Sensing libraries, built on top of the Arduino platform.
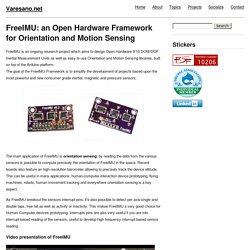
The goal of the FreeIMU Framework is to simplify the development of projects based upon the most powerful and new consumer grade inertial, magnetic and pressure sensors. The main application of FreeIMU is orientation sensing: by reading the data from the various sensors is possible to compute precisely the orientation of FreeIMU in the space. Recent boards also feature an high resolution barometer allowing to precisely track the device altitude. This can be useful in many applications: human-computer interaction device prototyping, flying machines, robots, human movement tracking and everywhere orientation sensing is a key aspect.
Video presentation of FreeIMU Older video presentations: FreeIMU v0.3, FreeIMU v0.1 and 0.2. A true Open Hardware project Getting FreeIMU Calibration. FreeIMU in Launchpad. Sf9domahrs - AHRS for Sparkfun's "9DOF Razor IMU" This is a Direction Cosine Matrix (DCM) based Attitude Heading Reference System (AHRS) with gyro drift correction based on accelerometer (gravity) vector and magnetometer (compass) vector.
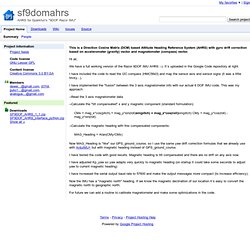
Hi all, We have a full working version of the Razor 9DOF IMU AHRS :-). It´s uploaded in the Google Code repository at right. I have included the code to read the I2C compass (HMC5843) and map the sensor axis and sensor signs (it was a little tricky...). I have implemented the "fusion" between the 3 axis magnetometer info with our actual 6 DOF IMU code. A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications. Introduction There’s now a FRENCH translation of this article in PDF.
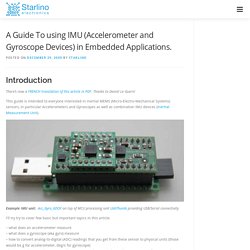
Thanks to Daniel Le Guern! This guide is intended to everyone interested in inertial MEMS (Micro-Electro-Mechanical Systems) sensors, in particular Accelerometers and Gyroscopes as well as combination IMU devices (Inertial Measurement Unit). Example IMU unit: Acc_Gyro_6DOF on top of MCU processing unit UsbThumb providing USB/Serial connectivity I'll try try to cover few basic but important topics in this article: – what does an accelerometer measure – what does a gyroscope (aka gyro) measure – how to convert analog-to-digital (ADC) readings that you get from these sensor to physical units (those would be g for accelerometer, deg/s for gyroscope) – how to combine accelerometer and gyroscope readings in order to obtain accurate information about the inclination of your device relative to the ground plane Throughout the article I will try to keep the math to the minimum.
Part 1. R^2 = Rx^2 + Ry^2 + Rz^2 (Eq. 1) Part 2. Tilt Compensating a Compass with an Accelerometer - Tutorials - Love Electronics. 9 Degrees of Freedom - Sensor Stick. Mongoose-9dof-imu - Firmware and software for the ckdevices Mongoose 9DOF IMU. a1ronzo/SparkFun-9DOF-Razor-IMU-Test-Firmware.