
Road Scene Segmentation from a Single Image. Road scene segmentation is important in computer vision for different applications such as autonomous driving and pedestrian detection.

Recovering the 3D structure of road scenes provides relevant contextual information to improve their understanding. In this paper, we use a convolutional neural network based algorithm to learn features from noisy labels to recover the 3D scene layout of a road image. The novelty of the algorithm relies on generating training labels by applying an algorithm trained on a general image dataset to classify on–board images.
Further, we propose a novel texture descriptor based on a learned color plane fusion to obtain maximal uniformity in road areas. Finally, acquired (off–line) and current (on–line) information are combined to detect road areas in single images. Xplore Full-Text PDF: Www.vision.ee.ethz.ch/~dragonr/1401.pdf. Www.csd.uwo.ca/~yuri/Papers/cvpr14_fm.pdf. DeepFlow_iccv2013.pdf. Geiger_et_al_pami13.pdf. Geiger_etal_cvpr11.pdf. Www.vision.ee.ethz.ch/~dragonr/1401.pdf. Www.stat.ucla.edu/~sczhu/papers/Conf_2014/Single_view_Scene_Reconstruction_cvpr2014.pdf. Www.jstraub.de/download/straub2014mmf.pdf. Www.inf.ethz.ch/personal/ladickyl/depth_cvpr14.pdf.
Web.engr.oregonstate.edu/~sinisa/research/publications/cvpr14_mutex.pdf. Faculty.ucmerced.edu/mhyang/papers/cvpr14_parsing.pdf. Cs.adelaide.edu.au/~wojtek/publicationsWC.html. Www.icg.tugraz.at/Members/kontschieder/iccv11.pdf. Web.engr.oregonstate.edu/~sinisa/research/publications/iccv11_3D.pdf. Liris.cnrs.fr/Documents/Liris-6293.pdf.
Xplore Full-Text PDF: We propose a novel approach for dense non-rigid 3D surface registration, which brings together Riemannian geometry and graphical models.
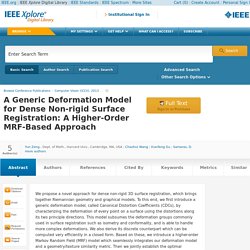
To this end, we first introduce a generic deformation model, called Canonical Distortion Coefficients (CDCs), by characterizing the deformation of every point on a surface using the distortions along its two principle directions. This model subsumes the deformation groups commonly used in surface registration such as isometry and conformality, and is able to handle more complex deformations. We also derive its discrete counterpart which can be computed very efficiently in a closed form.
Based on these, we introduce a higher-order Markov Random Field (MRF) model which seamlessly integrates our deformation model and a geometry/texture similarity metric. Then we jointly establish the optimal correspondences for all the points via maximum a posteriori (MAP) inference. Ruiqi Guo - Homepage. Pyramid-Based Shadow Removal. Abstract: In this paper we propose a novel method for detecting and removing shadows from a single image thereby obtaining a high-quality shadow-free image.With minimal user assistance, we first identify shadowed and lit areas on the same surface in the scene using an illumination-invariant distance measure.
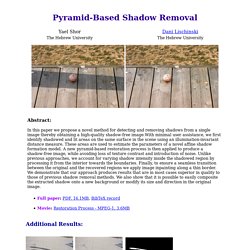
These areas are used to estimate the parameters of a novel affine shadow formation model. A new pyramid-based restoration process is then applied to produce a shadow-free image, while avoiding loss of texture contrast and introduction of noise. Unlike previous approaches, we account for varying shadow intensity inside the shadowed region by processing it from the interior towards the boundaries. Finally, to ensure a seamless transition between the original and the recovered regions we apply image inpainting along a thin border. Infoscience.epfl.ch/record/111781/files/piecewise_shadows.pdf. Shadow Detection: Source Code and Ground Truth Data. Shadow Removal. Jean-François Lalonde, Ph.D. Research My research interests are in computer vision and computer graphics, especially at the intersection of the two.

In particular, I am interested in exploring how understanding the illumination conditions in images can help us interpreting and synthesizing them better. Below are a few keywords capturing my main research interests. Contact me if you're interested in learning more! Illumination Understanding in Images Applications of Machine Learning in Vision and Graphics Data-Driven Image Synthesis High Dynamic Range Imaging Geometry and Appearance Capture Perception for Outdoor Mobile Robots Recherche Mes intérêts de recherche sont en vision artificielle et en infographie, et surtout à l'intersection de ces deux domaines.
The list of my publications is also available on Google Scholar. La liste de mes publications est aussi disponible sur Google Scholar. Detecting Ground Shadows in Outdoor Consumer Photographs. People Abstract Probability of shadow Detecting shadows from images can significantly improve the performance of several vision tasks such as object detection and tracking.

Recent approaches have mainly used illumination invariants which can fail severely when the qualities of the images are not very good, as is the case for most consumer-grade photographs, like those on Google or Flickr. We present a practical algorithm to automatically detect shadows cast by objects onto the ground, from a single consumer photograph. Citation Poster Dataset Download the dataset (with shadow boundary annotations) used to train and evaluate the shadow classifier presented in this paper. Code Download the code for this paper in a ZIP file, or get it from github. Funding This research is supported by: HOG Person Detector Tutorial. One of the most popular and successful “person detectors” out there right now is the HOG with SVM approach.
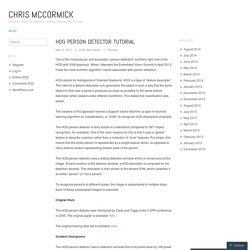
When I attended the Embedded Vision Summit in April 2013, it was the most common algorithm I heard associated with person detection. HOG stands for Histograms of Oriented Gradients. HOG is a type of “feature descriptor”. The intent of a feature descriptor is to generalize the object in such a way that the same object (in this case a person) produces as close as possible to the same feature descriptor when viewed under different conditions. HOG Descriptor in MATLAB. To help in my understanding of the HOG descriptor, as well as to allow me to easily test out modifications to the descriptor, I wrote functions in Octave for computing the HOG descriptor for a detection window.
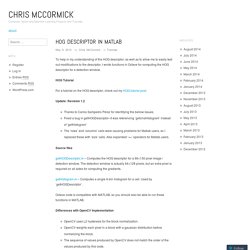
HOG Tutorial For a tutorial on the HOG descriptor, check out my HOG tutorial post. Update: Revision 1.2 Thanks to Carlos Sampedro Pérez for identifying the bellow issues.Fixed a bug in getHOGDescriptor–it was referencing ‘getUnsHistogram’ instead of ‘getHistogram’The ‘rows’ and ‘columns’ calls were causing problems for Matlab users, so I replaced these with ‘size’ calls. Also expanded ‘+=’ operators for Matlab users. Nlp.stanford.edu/courses/cs224n/2008/reports/10.pdf. HOGgles: Visualizing Object Detection Features - MIT. Carl VondrickAditya KhoslaTomasz MalisiewiczAntonio Torralba Massachusetts Institute of Technology Oral presentation at ICCV 2013 We introduce algorithms to visualize feature spaces used by object detectors.
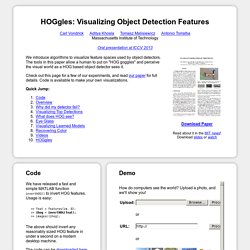
The tools in this paper allow a human to put on "HOG goggles" and perceive the visual world as a HOG based object detector sees it. Check out this page for a few of our experiments, and read our paper for full details. Code is available to make your own visualizations. Quick Jump: