
Index of /it/software/solidworks/64bit/SOLIDWORKS Plastics/Program Files 64/SOLIDWORKS Corp/SOLIDWORKS Plastics/MB/Polymer/Default/PMMA. Polycarbonate/ Plexi/ Makrolon / Lexan / Styro... Enfin des infos !!! - Modding - Overclocking, Cooling & Modding. J'ai reçu avant hier soir un email d'une dame fort sympathique, qui est une "pro du polycarbonate" et qui est tombée sur nos discussions à propos de plexi sur le forum.

Les énormités que nous disions ont du la faire beaucoup rire . Par ce mail elle a levé certains doutes et mis fin à quelques croyances erronées - Je vais y venir. Elle m'a ensuite proposé ses produits ; par un deuxième mail, j'en ai appris encore plus sur le polycarbonate, et aussi sur ses tarifs, ses services, les frais de port, etc... Je cite d'abord son premier mail : "bonjour, j'ai vu dans un forum de Hardware que vous discutiez souvent de l'utilisation de polycarbonate entre vous. . . . . : (...)Les infos que vous me donnez dans ce mail remettent en cause beaucoup de choses, beaucoup de préjugés. . . LAPCC MILO Long Arm Demo Mark Roberts Motion Control. Stop motion motion control dolly. How to Make a Professional Camera Slider (100% DIY!) DynamicPerception/OMLibraries. User guide for nanoMoCo, MoCoBus, and the new Motion Engine. The following user guide can also be found at the site of The nanoMoCo stepper driver/controller is a specialized, Arduino-compatible* device specifically designed to enable advanced multi-axis stepper-based robotics and automation projects less expensive, and easier to create.

Key features of the nanoMoCo include: Overhead Graphlite Portable Gantry Motion Control Camera Rig « PACIFIC MOTION CONTROL – Motion Control Camera Systems for Movie and Television Production, Motion Control Rigs, Rentals, 3D MoCo Systems, Cranes, Dollies, MoCo Heads, Commercials and Music Vi. The all-new overhead Graphlite rig is our latest motion control camera system.

While overhead motion control camera systems are not new to the film industry, the capabilities of the overhead Graphlite are unmatched. One Curious Robot: Getting feedback from the servo. You see, hobby servos are extremely easy to use but they are also pretty dumb, you would say them something like go to position “75 degrees” and then you will have faith that it reaches that point; but you really don’t get any confirmation from the servo.

So if you are having a situation that can induce some bias on the position, like a lot of torque applied against the rotor, you don’t get any clue to where it actually is (besides visual feedback when you see the robot arm smashing somewhere it shouldn’t smash). I decided I want to know where the servo rotor and horn actually are located at any time. For this endeavor I used the potentiometer that is already built in the servo. First I opened the servo. Then I desoldered the connections from the servo PCB to the motor, so I could remove the PCB and gain access to the potentiometer.
With this method I measured the voltage from the moving part of the potentiometer (that’s the middle connection point) to ground. The 7 Uses of Motion Control. Did we say 7 uses?

- Well that's not quite true. There are in fact countless. To many to list in a newsletter in detail, but there are generally 7 main reasons for using motion control. These categories are listed below and we will be covering them all in greater detail. Repeat Moves - Making elements appear and disappear, crowd replication, changing backgrounds and foregrounds, filming action at different speeds, putting elements together. The best known category of use is Repeat Moves and is the basis for all motion control. Scaled Moves Scaled moves is more than just taking a move and changing its size, and many different effects can be achieved using the scaling feature of Flair, the motion control software developed by Mark Roberts Motion Control.
Projects/PanAndTiltCameraBase - Nordeast Makers. PanoTilt Project Documentation[edit] Last Edit: 6/3/15 This project is inspired by the old defunct Open Moco project, and the companies that have arisen from the old open source projects--eMotimo and Dynamic Perception.
What is the MocoBus? – Dynamic Perception. MoCoBus is an open means for connecting motion control and photographic devices together to allow for intelligent systems to be centrally managed from any number of controllers, whether they be a computer, a cellphone, or speciality device powered by a microcontroller.

MoCoBus defines how devices are connected, the wiring used, and the protocol for communicating between devices. In this way, anyone who builds or purchases a device may be assured their device will connect with, communicate with, and not interfere with other devices on the bus. All aspects of this standard will be open and available for use by both open-source and proprietary technology companies - allowing for the greatest level of cooperation between devices. Interconnected, yet Autonomous. Ball Bearing Jib Arm w/ Motorized Pan & Tilt - All. Blog - Complex Ideas... 3D printing guides: Radial and linear ball bearings! OTHER BUILDS/PROJECTS. V-Slot™ Linear Actuator Bundle (Belt Driven) - OpenBuilds Part Store. %%Google SEO Code%% Loading...
Please wait... Advanced Search | Search Tips Categories Add to Wish List Click the button below to add the V-Slot™ Linear Actuator Bundle (Belt Driven) to your wish list. Camcorder Pan&Tilt ... - All. Okay, so you want to print your own Pan&Tilt (spin and tilt even) for your camcorder or GoPro to hang for security or to hang under an R/C flyer to scope out the area like a military UAV or news chopper 4 ...
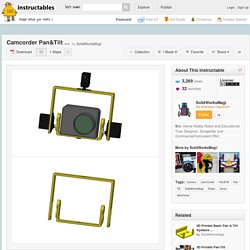
Here it is a two piece printable design ... easy and quick to print, install and use.
Les moteurs pas a pas. OpenMoco Provides An Open Platform For Time Lapse Makers. If you ever did any moving time lapse you know the challenges involved in making such a movie.

You would need a rail, a carriage, a precise and slow motor to drive it software to control the camera, power and a few other bits and bytes. To get an understanding of how complex such a project can be, check out the Slider project by Derek Mellott – a beautifully engineered piece of work. There are shortcuts however Project OpenMoco aims at providing a full open source system for time lapse enthusiasts and indie film makers. OpenMoco is built on top of the Arduino platform and provides all the necessary ingredients needed to build a complete time lapse system. Glissière télescopique à super extension, résistance à la charge 60 kg maxi. Mât F1BKM. NDR : André, F1BKM, a rédigé cette description pour Radio REF de Juillet/Août 2012. Par manque de place dans la revue, cet page complète l'article paru et permet de télécharger les croquis nécessaires à cette réalisation. Elle pourra être adaptée à d’autres systèmes d’installation de mâts en portable en n’utilisant, par exemple, que la partie relative au déploiement du mât.
Mon problème est de mettre à « bonne hauteur » (au moins 6 m du sol, maxi 10 m) plusieurs antennes : une 9 éléments 144, une 21 éléments 432 et une 35 éléments 1296… avec les câbles ceci donne « quelques kilos » au bout d’un bras de levier important ! Le tube 4 x 2 m alu prend une courbe assez impressionnante et l’OM peine dans la dernière phase de relevage (idem au démontage …). Il fallait donc réduire ce couple au maximum, ce qui a impliqué de diminuer le bras de levier lors du basculement car il n’était pas question de supprimer des antennes, ni d’avoir des câbles légers (avec pertes ). Photo 2.