
Algorithme de saut. Rocketman Development. Steering Behaviors For Autonomous Characters. Steering Behaviors For Autonomous Characters background and update by Craig Reynolds Abstract: This paper presents solutions for one requirement of autonomous characters in animation and games: the ability to navigate around their world in a life-like and improvisational manner.
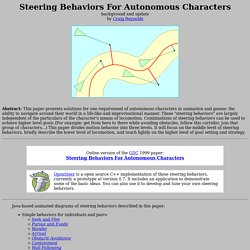
These "steering behaviors" are largely independent of the particulars of the character's means of locomotion. Combinations of steering behaviors can be used to achieve higher level goals (For example: get from here to there while avoiding obstacles, follow this corridor, join that group of characters...) This paper divides motion behavior into three levels. It will focus on the middle level of steering behaviors, briefly describe the lower level of locomotion, and touch lightly on the higher level of goal setting and strategy. Java-based animated diagrams of steering behaviors described in this paper: Note that I cannot distribute the source code for these applets. Centre de Formation Adobe - Wiki. Activez JavaScript pour une utilisation optimale.

Par Thoutmosis, le 08 janvier 2010 Bonjour et bienvenue dans ce tuto qui va vous aider à comprendre et à implémenter l'un des algorithmes de pathfinding les plus connus, j'ai nommé A* ( prononcez “A STAR” ). Cliquer pour créer ou effacer des murs. Point rouge = départ. Point bleu = arrivée. Ce tuto se veut la suite logique de celui que vous pouvez lire à cette adresse → Explication de l'algorithme de pathfinding A* - la théorie , sa lecture préalable est donc fortement recommandée si vous voulez comprendre ce qui se joue ici. Dans cette partie, nous allons créer une classe nommée Pathfinder qui contient une méthode statique findPath, de très petites notions d'objets sont donc recommandées mais non essentielles si vous comprenez ce qu'est une fonction il n'y aura aucun problème.
Coke and Code. So I guess it’s official, I’m starting to work on Legends of Yore 2 – which I’m subtitling Rise of the Darklings.

I’ll post some concept shots etc in a minute but I’d like to talk about the process I’ve been taking during the interim for a minute. As you’ve seen if you read my blog or follow on twitter I’ve been knocking out lots of little game demos, this is how I work. I try stuff, lots of stuff, over and over again until I feel comfortable I’ve got everything down. In this case the projects were: Voxel Based Engine – Experimenting with different graphical styles Carubloc – Looking at LibGDX across platforms Matchnik – To look a procedural puzzle generation Turn Based Platformer – To look at turn based mechanics with a bit more action Mega Melon Adventure – To play with gamepads and the OUYA Sub-pixel Sprite Animation – Obviously more tailored towards Legends, just needed to find a way to generate enough graphics.
Finally bits that I want to add that I didn’t have last time: Dungeon-Building Algorithm. (Originally written by Mike Anderson.)
Interesting random maps are one of the things that make roguelike games unique. They add greatly to the enjoyment of the game since the player will always be able to face fresh challenges and different problems. But random maps are far from easy to implement. In most conventional games, you would have a level designer who can create cunningly crafted scenarios. In any roguelike worthy of the name, the programmer must take on the daunting task of creating a "virtual level designer" which will be able to build unlimited numbers of interesting dungeons and mazes with nothing more than a random number generator......
In this article, I've documented the technique that I am developing for use in my own little roguelike called Tyrant. The goals of the dungeon builder When writing any piece of code, it's always useful to decide on the objectives beforehand. A basic dungeon will need: The Plan The inspiration came from the thought: The algorithm That's it. Recherche de chemin par l'algorithme A* Au premier abord, on pourrait se dire que pour trouver un chemin d'un point à un autre il faut commencer par se diriger vers la destination.

Et bien ... c'est justement cette idée qu'utilise l'algorithme A*. L'idée est très simple : à chaque itération (oui, c'est un algorithme itératif), on va tenter de se rapprocher de la destination, on va donc privilégier les possibilités directement plus proches de la destination, en mettant de côté toutes les autres. Toutes les possibilités ne permettant pas de se rapprocher de la destination sont mises de côté, mais pas supprimées. Elles sont simplement mises dans une liste de possibilités à explorer si jamais la solution explorée actuellement s'avère mauvaise.
En effet, on ne peut pas savoir à l'avance si un chemin va aboutir ou sera le plus court. L'algorithme va donc d'abord se diriger vers les chemins les plus directs. II-1. A* utilise deux listes, ces listes contiennent des points. II-2. II-3. Est-ce un obstacle ? II-4. II-5. III-1.