
Scooter électrique : Incroyables Expériences [91] Fabriquer un vélo électrique / DIY eBike. Quadcopter (3D Printed): 14 Steps (with Pictures) Flight controller This code isn't as hard as you can think.

It just use 3 PID algorithms for stabilizng it in 3 axis (x, y, z also cold pitch, yaw and roll), code for getting angles from mpu6050's DMP (digital motion processing), and also handle radio receiving and some basic math to calculate data received by radio. It stabilize itself at 100 times a second (100Hz) that's enaugh for this drone. PID algorithms: There are a lot of great explonations of how PID works, and because I not a good teatcher I woldn't try to explain how it works. This code is just copied from MPU6050 library. Here are just few lines to receive array of 8 bit numbers from pilot and convert it to throttle and rotation on x, y and z axis. Pilot Code for pilot is straight forward. Both codes you can find below. Drone - Arduino Project Hub.
DIY ARDUINO FLIGHT CONTROLLER : 12 Steps. To Tell you the truth this is not the hard part of this build its actually easy as long as you follow the steps.
Prepare the following Print out the PDF in HIGH Quality Prepare the baby OIL Prepare pre synthesized PCB 6x6cm Prepare a container filled with ferric Chloride. DIY ARDUINO FLIGHT CONTROLLER : 12 Steps. Code Archive - Long-term storage for Google Code Project Hosting. Arduino Quadcopter: What You Need to Build One (DIY Project) If you love the idea of building your own quadcopter but haven’t got a clue how and where to start, you are definitely on the right page.

We know how difficult and frustrating the research can be, so we decided to make a tutorial for building your own quadcopter using an Arduino board. We hope that you will find it useful. And, to get you even more excited about your upcoming project, here is an Arduino quadcopter in action: Building your own quadcopter from the ground up includes plenty of hours and hard work. Copter: ensure hexacopter with failed motor can make safe landing · Issue #838 · ArduPilot/ardupilot. Hexacopter crash after a prop break in flight - ArduCopter / Copter 3.3 - ArduPilot Discourse. Flying with only 5 motors on a hexacopter – DIY Drones. Drone à un seul moteur. Full control of a quadrotor. Réagir au vent. Perte d'une hélice. Flying Machine Arena. Jan Willmann, Federico Augugliaro, Thomas Cadalbert, Raffaello D’Andrea, Fabio Gramazio, and Matthias Kohler, “Aerial Robotic Construction: Towards a New Field of Architectural Research”, International journal of architectural computing, Vol. 10-3, pp.439-460, 2012.Bibtex Federico Augugliaro, Angela P.

Schoellig, and Raffaello D’Andrea, “Generation of Collision-free Trajectories for a Quadrocopter Fleet: A Sequential Convex Programming Approach”, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1917-1922, 2012.Pdf | Bibtex Markus Hehn and Raffaello D’Andrea, “Real-Time Trajectory Generation for Interception Maneuvers with Quadrocopters”, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4979–4984, 2012.Pdf | Bibtex Fabian L. Muller, Angela P. Mark W. Robin Ritz, Mark W. Angela P. Flying Machine Arena. Main Collaborators: Flying Machine Arena Team The Flying Machine Arena (FMA) is a portable space devoted to autonomous flight.
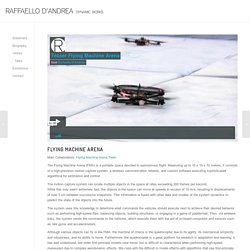
Measuring up to 10 x 10 x 10 meters, it consists of a high-precision motion capture system, a wireless communication network, and custom software executing sophisticated algorithms for estimation and control. The motion capture system can locate multiple objects in the space at rates exceeding 200 frames per second. While this may seem extremely fast, the objects in the space can move at speeds in excess of 10 m/s, resulting in displacements of over 5 cm between successive snapshots. This information is fused with other data and models of the system dynamics to predict the state of the objects into the future. The system uses this knowledge to determine what commands the vehicles should execute next to achieve their desired behavior, such as performing high-speed flips, balancing objects, building structures, or engaging in a game of paddle-ball.
Où faire voler son drone dans le monde ? - Report'air Drone. Alors, on part en voyage et on veut des supers photos pour impressionner ses amis ?

Il faut le dire : avec une photo ou une vidéo par drone, vous allez cumuler les »like » sur Facebook ! Mais quand on fait le tour du monde, la loi, elle change dès qu’on passe la frontière. Pour vous y retrouver, et ne pas vous retrouver au poste de police, petit tour d’horizon de la législation en vigueur dans les pays… où on a trouvé un cadre légal! Attention : ces lois peuvent changer à tout moment. Les agriculteurs, premiers utilisateurs de drones. Plusieurs milliers d'entre eux emploient ces machines pour optimiser les quantités d'engrais utilisées.

Alors que l'Inra fête ses 70 ans cette année en organisant des festivités et conférences sur les grandes évolutions de la ferme France passées et à venir, les regards des paysans sont tournés vers le ciel. Qui aurait cru il y a moins de cinq ans que l'agriculture serait le premier utilisateur de drones dans l'Hexagone? En effet, l'an dernier, «la moitié des vols de drones déclarés en France à la DGAC (Direction générale de l'aviation civile), soit 20.000 au total, a été enregistrée au nom d'Airinov pour le survol de parcelles agricoles», souligne Romain Faroux. Ce fils d'agriculteur est cofondateur avec deux autres jeunes ingénieurs agronomes de la société née en 2010 dans la Vienne dans l'étable familiale.
Depuis, elle a grandi et s'est exilée à Paris dans le XVIIIe arrondissement. Vous utilisez un bloqueur de publicité. Les drones: De multiples applications civils by joseph reinhart on Prezi.
Drone: Informations générales. Drone: Surveillance. Drone: Agriculture. Drone: Aménagement du territoire. Drone: Actus et projets. Drone: Physique. #Drone | @thomaswdesign. Drone: Production. Comment construire un quadcopter?