
Robotics. Robotics is the branch of mechanical engineering, electrical engineering and computer science that deals with the design, construction, operation, and application of robots,[1] as well as computer systems for their control, sensory feedback, and information processing.

These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics. The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century.[2] Throughout history, robotics has been often seen to mimic human behavior, and often manage tasks in a similar fashion.
Etymology[edit] Behavior Trees (Artificial Intelligence, Robotics and Control) This article is about Behavior Trees in AI, games, control systems and robotics.
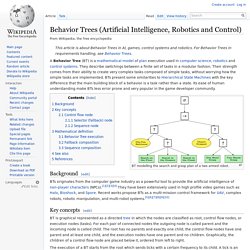
For Behavior Trees in requirements handling, see Behavior Trees. A Behavior Tree (BT) is a mathematical model of plan execution used in computer science, robotics and control systems. They describe switchings between a finite set of tasks in a modular fashion. Their strength comes from their ability to create very complex tasks composed of simple tasks, without worrying how the simple tasks are implemented. BTs present some similarities to Hierarchical State Machines with the key difference that the main building block of a behavior is a task rather than a state. BT modelling the search and grasp plan of a two armed robot. The execution of a BT starts from the root which sends ticks with a certain frequency to its child. A control flow node is used to control the subtasks of which it is composed. Figure I.
Fallback nodes are used to find and execute the first child that does not fail. Figure II. Where.
Microelectromechanical systems. Proposal submitted to DARPA in 1986 first introducing the term "microelectromechanical systems" Microelectromechanical systems (MEMS) (also written as micro-electro-mechanical, MicroElectroMechanical or microelectronic and microelectromechanical systems and the related micromechatronics) is the technology of very small devices; it merges at the nano-scale into nanoelectromechanical systems (NEMS) and nanotechnology.
MEMS are also referred to as micromachines (in Japan), or micro systems technology – MST (in Europe). MEMS are separate and distinct from the hypothetical vision of molecular nanotechnology or molecular electronics. MEMS are made up of components between 1 to 100 micrometres in size (i.e. 0.001 to 0.1 mm), and MEMS devices generally range in size from 20 micrometres (20 millionths of a metre) to a millimetre (i.e. 0.02 to 1.0 mm). Materials for MEMS manufacturing[edit] Smart objects. A Smart Object is an object that enhances the interaction with not only people but also with other Smart Objects.

It can not only refer to interaction with physical world objects but also to interaction with virtual (computing environment) objects. A smart physical object may be created either as an artifact or manufactured product or by embedding electronic tags such as RFID tags or sensors into non-smart physical objects. Smart virtual objects are created as software objects that are intrinsic when creating and operating a virtual or cyber world simulation or game. The concept of a smart object has several origins and uses, see History. Internet of Things. The Internet of Things (IoT) is the network of physical objects or "things" embedded with electronics, software, sensors and connectivity to enable it to achieve greater value and service by exchanging data with the manufacturer, operator and/or other connected devices.
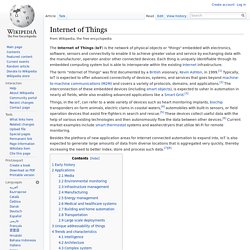
Each thing is uniquely identifiable through its embedded computing system but is able to interoperate within the existing Internet infrastructure. Industrial Internet. The industrial internet is a term coined by General Electric[1] and refers to the integration of complex physical machinery with networked sensors and software.
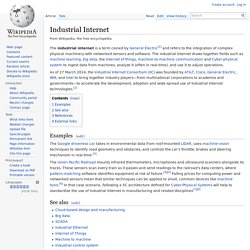
The industrial Internet draws together fields such as machine learning, big data, the Internet of things, machine-to-machine communication and Cyber-physical system to ingest data from machines, analyze it (often in real-time), and use it to adjust operations. PID controller. Some applications may require using only one or two actions to provide the appropriate system control.
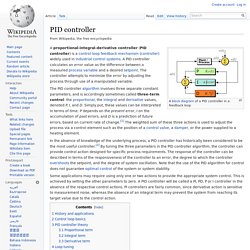
This is achieved by setting the other parameters to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence of an integral term may prevent the system from reaching its target value due to the control action. History and applications[edit] PID theory developed by observing the action of helmsmen. The Navy ultimately did not adopt the system, due to resistance by personnel. Control system. Industrial control system. Automation. Automation or automatic control, is the use of various control systems for operating equipment such as machinery, processes in factories, boilers and heat treating ovens, switching in telephone networks, steering and stabilization of ships, aircraft and other applications with minimal or reduced human intervention.

Some processes have been completely automated. The biggest benefit of automation is that it saves labor, however, it is also used to save energy and materials and to improve quality, accuracy and precision. The term automation, inspired by the earlier word automatic (coming from automaton), was not widely used before 1947, when General Motors established the automation department.[1] It was during this time that industry was rapidly adopting feedback controllers, which were introduced in the 1930s.[2]