Fundamentals of Mapping
Some Commonly Used Map Projections This section outlines the features of a selection of more commonly used projects. It is by no means a full list projections which are commonly used today. Contents Introduction Comparison of these projections: Azimuthal Projection – Stereographic The oldest known record of this projection is from Ptolemy in about 150 AD. Today, this is probably one of the most widely used Azimuthal projections. This is a conformal projection in that shapes are well preserved over the map, although extreme distortions do occur towards the edge of the map. One interesting feature of the Stereographic projection is that any straight line which runs through the centre point is a Great Circle. These are two examples of maps using Stereographic projection over polar areas. Produced Using G.PROJECTOR – software developed by NASA and the Goddard Institute for Spatial Studies. Conic Projection – Lambert Conformal Conic Distances are only true along the Standard Parallels. UTM Zones
Análisis de Poemas
Scavenger hunt
A scavenger hunt is a party game in which the organizers prepare a list defining specific items, which the participants – individuals or teams – seek to gather all items on the list – usually without purchasing them – or perform tasks or take photographs of the items, as specified.[1] The goal is usually to be the first to complete the list, although in a variation on the game players can also be challenged to complete the tasks on the list in the most creative manner. According to game scholar Markus Montola, scavenger hunts evolved from ancient folk games.[2] Gossip columnist Elsa Maxwell popularized scavenger hunts in the United States with a series of exclusive New York parties starting in the early 1930s.[3][4][5] The scavenger-hunt craze among New York's elite was satirized in the 1936 film My Man Godfrey, where one of the items socialite players are trying to collect is a homeless man.[6]
Hide and seek
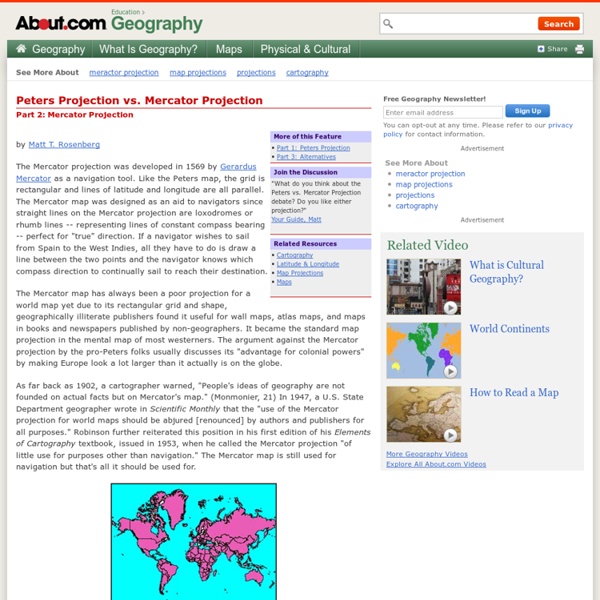
Mercator projection
Mercator projection of the world between 82°S and 82°N. Mercator world map (Nova et Aucta Orbis Terrae Descriptio ad Usum Navigantium Emendate Accommodata (1569) For higher resolution and coloured images see Mercator 1569 world map. That page contains details of the map and translations of the texts Properties and historical details[edit] The name and explanations given by Mercator to his world map (Nova et Aucta Orbis Terrae Descriptio ad Usum Navigantium Emendata: "new and augmented description of Earth corrected for the use of sailors") show that it was expressly conceived for the use of marine navigation. The development of the Mercator projection represented a major breakthrough in the nautical cartography of the 16th century. Several authors are associated with the development of Mercator projection: Uses[edit] The Mercator projection portrays Greenland as larger than Australia; in actuality, Australia is more than three and a half times larger than Greenland. The spherical model[edit]
Map projection
More generally, the surfaces of planetary bodies can be mapped even if they are too irregular to be modeled well with a sphere or ellipsoid; see below. Even more generally, projections are the subject of several pure mathematical fields, including differential geometry and projective geometry. However "map projection" refers specifically to a cartographic projection. Background[edit] Maps can be more useful than globes in many situations: they are more compact and easier to store; they readily accommodate an enormous range of scales; they are viewed easily on computer displays; they can facilitate measuring properties of the terrain being mapped; they can show larger portions of the Earth's surface at once; and they are cheaper to produce and transport. However, Carl Friedrich Gauss's Theorema Egregium proved that a sphere's surface cannot be represented on a plane without distortion. For simplicity most of this article assumes that the surface to be mapped is that of a sphere.
POETAS ESPAÑOLES
The Arthur H. Robinson Map Library at the University of Wisconsin-Madison
Robinson called this the orthophanic projection (which means "right appearing"), but this name never caught on. In at least one reference book, this projection is termed the Pseudocylindrical Projection with Pole Line, which is highly descriptive (the "pole line" comes from the fact that the North and South Poles on a Robinson projection are shown as lines and not points), but so unwieldily that it is not surprising that this name also failed to gain much acceptance. The "Robinson projection" is unquestionably the name of choice. The Robinson projection is highly unique. Form: The Robinson projection can best be described as being pseudocylindrical, but given its unique method of development, it does not fall perfectly into any known form category. Case: The Robinson projection is basically secant, with lines of tangency running along the 38° 0' 0"N and 38° 0' 0"S lines of latitude. Aspect: Robinson projections have normal aspects. Distortions Uses The Robinson projection is unique.
Map Projections: Azimuthal Projections
<br /><table class="warning" summary=""><tr><td><h2 class="warning">JavaScript Is Not Available</h2><table summary=""><tr><td><img src="../../StockImg/warning36.png" alt=""></td><td> </td><td><em>Since JavaScript is disabled or not supported in your browser, some or all maps in this page will not be displayed.</em></td></tr></table></td></tr></table><br /> Introduction Given a reference point A and two other points B and C on a surface, the azimuth from B to C is the angle formed by the minimum-distance lines AB and AC (which, on a sphere, are geodesic or great circle arcs). In other words, it represents the angle one sitting on A and looking at B must turn in order to look at C. All azimuthal projections preserve the azimuth from a reference point (the conceptual center of the map), thus presenting true direction (but not necessarily distance) to any other points. In a few two-point azimuthal projections, correct angles are presented from two specific locations instead of one.