
A straightforward technique to clarify Fringe Projection. Point cloud. A point cloud image of a torus.
A point cloud is a set of data points in some coordinate system. In a three-dimensional coordinate system, these points are usually defined by X, Y, and Z coordinates, and often are intended to represent the external surface of an object. Point clouds may be created by 3D scanners. These devices measure in an automatic way a large number of points on the surface of an object, and often output a point cloud as a data file. The point cloud represents the set of points that the device has measured. I/O - Definition. Definition: I/O is an abbreviation of Input / Output and refers to the transfer of data to or from an application.

Input devices are usually but not always character input devices such as the keyboard, mouse or keyboard. They can also include stream devices like a disk. Output devices include the screen or a printer or anything plugged into a PC's port. Photogrammetry. 3D Trilateration. The Direct Survey Method (DSM) is three-dimensional trilateration.

In this method distance, depth and position measurements are used to compute the positions of control points and features. Build Your Own 3D Scanner: Optical Triangulation for Beginners. Triangulation (computer vision) In computer vision triangulation refers to the process of determining a point in 3D space given its projections onto two, or more, images.
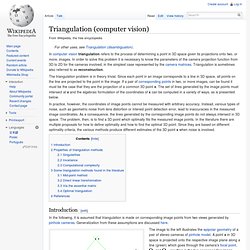
In order to solve this problem it is necessary to know the parameters of the camera projection function from 3D to 2D for the cameras involved, in the simplest case represented by the camera matrices. Triangulation is sometimes also referred to as reconstruction. The triangulation problem is in theory trivial. Since each point in an image corresponds to a line in 3D space, all points on the line are projected to the point in the image. If a pair of corresponding points in two, or more images, can be found it must be the case that they are the projection of a common 3D point x. In practice, however, the coordinates of image points cannot be measured with arbitrary accuracy.
The ideal case of epipolar geometry. In practice, the image points y1 and y2 cannot be measured with arbitrary accuracy. And , resulting in the two corresponding image points . . 3D Metrology, 3D Computed Tomography, Computerised Tomography. 3D metrology with industrial X-ray CT (computed tomography) is the only technique allowing to non-destructively measure the interior of complex objects.
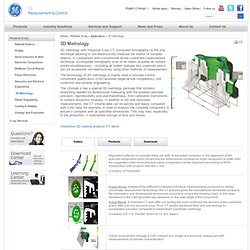
In comparison with conventional tactile coordinate measurement technique, a computed tomography scan of an object acquires all surface points simultaneously – including all hidden features like undercuts which are not accessible non-destructively using other methods of measurement. Basics of Photogrammetry. ERDAS IMAGINE. ERDAS IMAGINE is a remote sensing application with raster graphics editor abilities designed by ERDAS for geospatial applications.

The latest version is 2013, version 13.0.2. ERDAS IMAGINE is aimed primarily at geospatial raster data processing and allows the user to prepare, display and enhance digital images for mapping use in geographic information system (GIS) or in computer-aided design (CAD) software. It is a toolbox allowing the user to perform numerous operations on an image and generate an answer to specific geographical questions. By manipulating imagery data values and positions, it is possible to see features that would not normally be visible and to locate geo-positions of features that would otherwise be graphical. Orthophoto. Orthographic views project at a right angle to the data plane.
Perspective views project from the surface onto the datum plane from a fixed location. Leica Photogrammetry Suite. Leica Photogrammetry Suite (name officially and legally changed to LPS) is a software application for performing photogrammetric operations on imagery and extracting information from imagery.
LPS is significant because it is a leading commercial photogrammetry application that is used by numerous national mapping agencies, regional mapping authorities, various DOTs,[1] as well as commercial mapping firms. Aside from commercial and government applications, LPS is widely used in academic research. Research areas include landslide monitoring,[2] cultural heritage studies,[3] and more. Capabilities[edit] LPS is generally used for the processing of raw imagery through to the creation of geospatial data products such as digital terrain models, 3D features, and digital orthophotos. Other workflows[edit] 3D scanner. 3D scanner used to create the 3D animation A 3D scanner is a device that analyzes a real-world object or environment to collect data on its shape and possibly its appearance (i.e. color).

The collected data can then be used to construct digital three-dimensional models. Many different technologies can be used to build these 3D-scanning devices; each technology comes with its own limitations, advantages and costs. Many limitations in the kind of objects that can be digitized are still present, for example, optical technologies encounter many difficulties with shiny, mirroring or transparent objects.
For example, industrial computed tomography scanning can be used to construct digital 3D models, applying non-destructive testing. 3D data acquisition and object reconstruction. 3D data acquisition and reconstruction is the generation of three-dimensional or spatiotemporal models from sensor data.
The techniques and theories, generally speaking, work with most or all sensor types including optical, acoustic, laser scanning, radar, thermal,[1] seismic.[2][3] Acquisition[edit] Photogrammetry. Photogrammetry is an estimative scientific method that aims at recovering the exact positions and motion pathways of designated reference points located on any moving object, on its components and in the immediately adjacent environment. Photogrammetry employs high-speed imaging and the accurate methods of remote sensing in order to detect, measure and record complex 2-D and 3-D motion fields (see also SONAR, RADAR, LiDAR etc.). Photogrammetry feeds the measurements from remote sensing and the results of imagery analysis into computational models in an attempt to successively estimate, with increasing accuracy, the actual, 3-D relative motions within the researched field.
Its applications include satellite tracking of the relative positioning alterations in all Earth environments (e.g. tectonic motions etc), the research on the swimming of fish, of bird or insect flight, other relative motion processes (International Society for Photogrammetry and Remote Sensing). Integration[edit]