
GitHub - bonzaiferroni/bonzAI. GitHub - ScreepsOCS/screeps.ocs: Open Collaboration Society. Simultaneous execution of creep actions – Screeps Support Center. The exact methods available to a creep are determined by his parts.
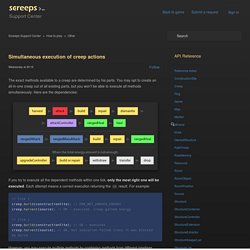
You may opt to create an all-in-one creep out of all existing parts, but you won't be able to execute all methods simultaneously. Here are the dependencies: If you try to execute all the dependent methods within one tick, only the most right one will be executed. Each attempt means a correct execution returning the OK result. For example: creep.build(constructionSite); creep.harvest(source); creep.build(constructionSite); creep.harvest(source); However, you may execute multiple methods by combining methods from different pipelines (including those which are not involved in any dependency above).
Creep.moveTo(target); creep.rangedMassAttack(); creep.heal(target); creep.transfer(target, RESOURCE_ENERGY, amountTransfer); creep.drop(amountDrop, RESOURCE_ENERGY); creep.pickup(energy); creep.claimController(controller); All these methods may be successfully executed within one tick. Methods call priority Additionally. An Introduction to Behavior Trees - Part 1. This post is actually part of the first draft of a report I’m doing for my PhD.
My idea in PhD is to use Behavior Trees for both games and robotics, thus you will see some references and examples using robots here. Fast links for other parts and tutorials: An Introduction to Behavior Tree – (part 1)(part 2)(part 3)Implementing A Behavior Tree – (part 1)(part 2) If you’re looking for actual code to use, check it out: Algorithm - Wikipedia.
Computational complexity theory. Computational complexity theory is a branch of the theory of computation in theoretical computer science and mathematics that focuses on classifying computational problems according to their inherent difficulty, and relating those classes to each other.
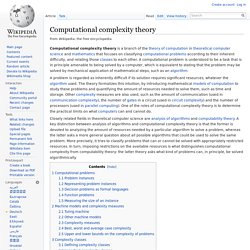
A computational problem is understood to be a task that is in principle amenable to being solved by a computer, which is equivalent to stating that the problem may be solved by mechanical application of mathematical steps, such as an algorithm. A problem is regarded as inherently difficult if its solution requires significant resources, whatever the algorithm used. The theory formalizes this intuition, by introducing mathematical models of computation to study these problems and quantifying the amount of resources needed to solve them, such as time and storage. Theory of computation. An artistic representation of a Turing machine.
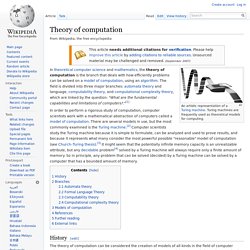
Turing machines are frequently used as theoretical models for computing. In theoretical computer science and mathematics, the theory of computation is the branch that deals with how efficiently problems can be solved on a model of computation, using an algorithm. The field is divided into three major branches: automata theory and language, computability theory, and computational complexity theory, which are linked by the question: "What are the fundamental capabilities and limitations of computers?. " Theoretical computer science. An artistic representation of a Turing machine.
Turing machines are used to model general computing devices. Theoretical computer science (TCS) is a subset of general computer science and mathematics that focuses on more mathematical topics of computing and includes the theory of computation. It is difficult to circumscribe the theoretical areas precisely. The ACM's Special Interest Group on Algorithms and Computation Theory (SIGACT) provides the following description:[1] TCS covers a wide variety of topics including algorithms, data structures, computational complexity, parallel and distributed computation, probabilistic computation, quantum computation, automata theory, information theory, cryptography, program semantics and verification, machine learning, computational biology, computational economics, computational geometry, and computational number theory and algebra. History[edit] Topics[edit] Algorithms[edit] An algorithm is a step-by-step procedure for calculations.
Conferences[edit] Time complexity - Wikipedia. Structured programming - Wikipedia. It emerged in the late 1950s with the appearance of the ALGOL 58 and ALGOL 60 programming languages,[1] with the latter including support for block structures.
Contributing factors to its popularity and widespread acceptance, at first in academia and later among practitioners, include the discovery of what is now known as the structured program theorem in 1966,[2] and the publication of the influential "Go To Statement Considered Harmful" open letter in 1968 by Dutch computer scientist Edsger W.
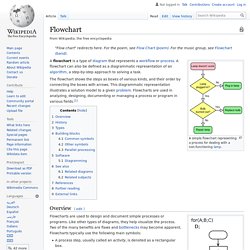
Dijkstra, who coined the term "structured programming". Structured programming is most frequently used with deviations that allow for clearer programs in some particular cases, such as when exception handling has to be performed. Elements[edit] Control structures[edit] Following the structured program theorem, all programs are seen as composed of control structures: Algorithm. JSON. Flowchart - Wikipedia. A simple flowchart representing a process for dealing with a non-functioning lamp.
Boosting (machine learning) - Wikipedia. While boosting is not algorithmically constrained, most boosting algorithms consist of iteratively learning weak classifiers with respect to a distribution and adding them to a final strong classifier.
When they are added, they are typically weighted in some way that is usually related to the weak learners' accuracy. After a weak learner is added, the data are reweighted: examples that are misclassified gain weight and examples that are classified correctly lose weight (some boosting algorithms actually decrease the weight of repeatedly misclassified examples, e.g., boost by majority and BrownBoost). Thus, future weak learners focus more on the examples that previous weak learners misclassified. Given images containing various known objects in the world, a classifier can be learned from them to automatically categorize the objects in future images. Simple classifiers built based on some image feature of the object tend to be weak in categorization performance. Yoav Freund and Robert E. Behavior tree (artificial intelligence, robotics and control) - Wikipedia.
This article is about behavior trees in AI, games, control systems and robotics.
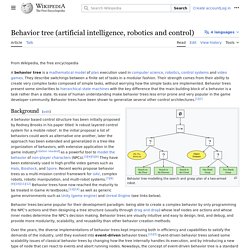
For behavior trees in requirements handling, see Behavior tree. BT modelling the search and grasp plan of a two-armed robot. It has been shown that BTs generalize a number of earlier control architectures, such as The execution of a BT starts from the root which sends ticks with a certain frequency to its child. Decision tree. Traditionally, decision trees have been created manually.
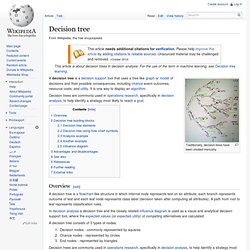
A decision tree is a decision support tool that uses a tree-like graph or model of decisions and their possible consequences, including chance event outcomes, resource costs, and utility. It is one way to display an algorithm. Decision trees are commonly used in operations research, specifically in decision analysis, to help identify a strategy most likely to reach a goal. Decision tree learning.
Decision tree learning uses a decision tree (as a predictive model) to go from observations about an item (represented in the branches) to conclusions about the item's target value (represented in the leaves). It is one of the predictive modelling approaches used in statistics, data mining and machine learning. Tree models where the target variable can take a discrete set of values are called classification trees; in these tree structures, leaves represent class labels and branches represent conjunctions of features that lead to those class labels.
Decision trees where the target variable can take continuous values (typically real numbers) are called regression trees.