
Dense Scene Reconstruction with Points of Interest - Vladlen Koltun. 3d Scanners.
3D From Images (SfM, Photogrammetry) PointCloud™ OpenMVG: "open Multiple View Geometry" "open Multiple View Geometry" is a library for computer-vision scientists and especially targeted to the Multiple View Geometry community.

It is designed to provide an easy access to the classical problem solvers in Multiple View Geometry and solve them accurately. The openMVG credo is: "Keep it simple, keep it maintainable". OpenMVG targets readable code that is easy to use and modify by the community. All the features and modules are unit tested. This test driven development ensures that the code works as it should and enables more consistent repeatability. Parallel Tracking and Mapping for Small AR Workspaces (PTAM) - e. Sfmtoolkit » Visual-Experiments.com. I’ve worked a lot on OpenSynther lately: OpenSynther is the name of my structure-from-motion solution.

This new version is a major rewrite of the previous version which was using Surf with both GPU and multi-core CPU matching. The new version is using SiftGPU and Flann to achieve linear matching complexity of unstructured input as described in Samantha paper. You can find more information about OpenSynther features on it dedicated page (including source code). OpenSynther has been designed as a library (OpenSyntherLib) which has already proven to be useful for several programs written by myself:
Pointshop3D. Pointshop3D is a software system for interactive editing of point-based surfaces, developed at the Computer Graphics Lab at ETH Zurich (Switzerland).
Pointshop3D was presented at SIGGRAPH 2002 in San Antonio. The Boolean operation and free form deformation tools of Pointshop3D 2.0 were presented at SIGGRAPH 2003 in San Diego. Please note that we will give support for Pointshop3D only until December 2006. However, we will not remove Pointshop3D from the web, so it will still be available for download. Pointshop 3D: An Interactive System for Point-Based Surface Editing M. Shape Modeling with Point-sampled Geometry M. VisualSFM : A Visual Structure from Motion System. Building VisualSFM on Ubuntu 12.04 (Precise Pangolin) Desktop 64-bit. Updated: Check out my paper on parallelizing SfM across a compute cluster VisualSFM by Changchang Wu is a great tool for creating 3D reconstructions of photos.

It’s really easy to use, but really hard to install. This guide will take you through getting it working on a clean installation of Ubuntu 12.04 Desktop 64-bit. I’ll warn you: you’ll need to install packages, download academic software, and edit and compile source code. This will also require more than 2 GB of hard drive space.
Getting Started Start by creating a working directory for this procedure. . $ mkdir vsfm $ cd vsfm (Note, whenever you see a line beginning with “$”, that means you should type that line in your terminal.) Setup NVIDIA CUDA (Optional) VisualSFM supports acceleration on CUDA-enabled NVIDIA GPUs. Grab the Linux 64-bit driver and the CUDA toolkit from the CUDA Downloads page. Download the Necessary Software. Multicore Bundle Adjustment. The emergence of multi-core computers represents a fundamental shift, with major implications for the design of computer vision algorithms.

Most computers sold today have a multicore CPU with 2-16 cores and a GPU with anywhere from 4 to 128 cores. Exploiting this hardware parallelism will be key to the success and scalability of computer vision algorithms in the future. In this project, we consider the design and implementation of new inexact Newton type Bundle Adjustment algorithms that exploit hardware parallelism for efficiently solving large scale 3D scene reconstruction problems. We explore the use of multicore CPU as well as multicore GPUs for this purpose. We show that overcoming the severe memory and bandwidth limitations of current generation GPUs not only leads to more space efficient algorithms, but also to surprising savings in runtime.
CMP SfM Web Service. Authors: Michal Jancosek & Tomas Pajdla Software written by: Michal Jancosek Latest version: 0.6.0 Release date: September 28, 2012 Reference to cite: [1] M.

Jancosek, T. Pajdla. Multi-View Reconstruction Preserving Weakly-Supported Surfaces, CVPR 2011 - IEEE Conference on Computer Vision and Pattern Recognition 2011 (pdf). Introduction CMPMVS is a multi-view reconstruction software. For discussion on the software please visit our Google group at Note It is just images from your camera which you need to compute detailed textured 3D reconstructions using VisualSfM+CMPMVS. Download. CMVS. Introduction Many multi-view stereo (MVS) algorithms do not scale well to a large number of input images (lack of computational and memory resources).
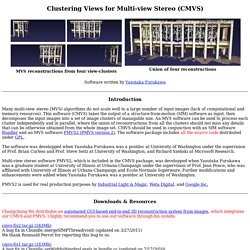
This software (CMVS) takes the output of a structure-from-motion (SfM) software as input, then decomposes the input images into a set of image clusters of managable size. An MVS software can be used to process each cluster independently and in parallel, where the union of reconstructions from all the clusters should not miss any details that can be otherwise obtained from the whole image set. CMVS should be used in conjunction with an SfM software Bundler and an MVS software PMVS2 (PMVS version 2). The software package includes all the source code distributed under GPL. The software was developped when Yasutaka Furukawa was a postdoc at University of Washington under the supervision of Prof.
PMVS2 is used for real production purposes by Industrial Light & Magic, Weta Digital, and Google Inc. Downloads & Resources Gallery Terms and Conditions.