
Labsland Laboratory Browser. Practicas con Arduino. Este manual de prácticas supone una aventura y una nueva forma de enfocar el material educativo.

En él se recopilan prácticas y proyectos que encajan perfectamente en un currículum estándar de 4º de ESO (alumnos de entre 15 y 16 años) para la materia de Tecnologías. Se trata de una herramienta didáctica que facilite implantar una metodología en el aula basada en proyectos. Como núcleo central para el control electrónico de los proyectos se va a utilizar la tarjeta controladora Arduino ( Se ha elegido esta placa por tener licencia libre, bajo coste y alcance a nivel mundial. Reto 1. La iluminacion by RSUAGUED on Genial.ly. Cursos y tutoriales de programación con Arduino. Josepujol/CursoCEP_Arduino_AppInventor. Aprende pensamiento computacional con Arduino. Javacasm/STEAMArduinoUIMP: Fomenta el pensamiento STEM haciendo robótica con Arduino.
Tecnología (asignatura STEM) - MakerMania. Sensor de nivel de agua con Arduino utilizando ultrasonidos. Alarma de incendios con altavoz incorporado. Prácticas con Arduino. Edubasica. Control PID con Arduino - BricoGeek.com. Paper Controller (Buttons + Slider) Prácticas de introducción al puerto Serie de Arduino. ¡Saludos, estudiantes!.

¡Bienvenidos!. ¡Pasad! , ¡pasad!. ¡Me alegro mucho de veros otra vez!. Ws2812b - Diodos rgb con Arduino y Edushield Canarias. Divirtiéndome con mBot: Guia de manejo y programacióm (Libro Junio 2016) by Susana Oubiña Falcón. Circuito.io. NUEVA TECNOLOGÍA: PROGRAMA TU PUERTA AUTOMÁTICA CON ARDUINO. En ocasiones nos preguntamos cómo funcionan las puertas automáticas de los grandes centros comerciales o la propia puerta del garaje.

La respuesta es bien sencilla: emplean automatismos. En esta ocasión vamos a emplear como sensor, un sensor de movimiento PIR y como actuadores un par de LEDs que nos señalen el estado en el que se encuentra la puerta y un motor que genere el movimiento para deslizar la puerta de un lado para otro. Un sensor PIR (sensores infrarrojos pasivos) es un dispositivo que detecta movimiento; recuerda!!
, te aproximas a la puerta y esta se abre. Son baratos, pequeños, y fáciles de usar. Enlaces para más información Fuente imagen: Simulador TinkerCad En primer lugar debemos comprobar si todo marcha ok, es decir si nuestro sensor detecta la presencia deseada. Un aspecto que debemos tener en cuenta es que nuestro motor tiene que cambiar el sentido de giro para abrir y cerrar la puerta.
Una cosa es simular y otra llevar tu proyecto a la práctica. SEMILLERO CONTROLADO POR ARDUINO - Página web del CEIP San Andrés (Montejícar) El cajón de Arduino: Tutorial - Cruce de semáforos LED. Smart home with arduino. 15 Arduino Uno Breadboard Projects For Beginners w/ Code - PDF. FREE EBOOK (PDF) – Ultimate Beginners Guide To Arduino The easiest way for beginners to get started with Arduino is by creating circuits using a solderless breadboard.

These simple projects will teach you the basics of Arduino Uno, electronics and programming. In this tutorial, you will be creating circuits using the following electronic components: LEDRGB LEDTemp SensorPushbuttonPotentiometerPhotoresistorServoMotorBuzzerLCD screen This tutorial is going to allow you to jump right in and start building circuits. Before you can start working with Arduino, you need to make sure you have the IDE software installed on your computer.
Once the IDE is installed, you will need to connect your Arduino to your computer. Select The Board Once the board is plugged in, you will need to open the IDE and click on Tools > Board > Arduino Uno to select the board. Select Serial Port Next, you have to tell the Arduino which port you are using on your computer.
Download Project Code – (ZIP File) Sunflower - Arduino Project Hub. Conoce la interfaz de mBlock y programa los primeros pasos de tu mBot. – Programamos. MBlock: La interfaz.
En esta entrada anterior ya os hablamos de Mbot, un robot destinado a que podamos adentrarnos en el mundo de la robótica desde edades muy tempranas. Hoy, queremos presentaros MBlock, la plataforma de programación basada en Scratch, la cual nos ofrece la posibilidad de programar nuestro mBot de manera sencilla e intuitiva, utilizando bloques ya definidos e incluso creando otros nuevos, aumentando así nuestras posibilidades de diversión. Como decimos, al igual que en la ya conocida Scratch, cada objeto presenta su propia pestaña de “programas”, “disfraces” o “sonidos”. En la parte superior, encontramos una leyenda que nos indica el estado de conexión de nuestra placa y posteriormente, el menú principal de la aplicación mBlock, el cuál se encuentra dividido en las siguientes pestañas: 1. El robot MakeBlock mBot. Makeblock mBot es un robot cuyas características más destacadas son: Es un robot ligero (900 g. aprox), autónomo y programable.Se monta fácilmente y resulta bastante compacto y resistente.Se puede programar usando el software mBlock inspirado en Scratch.Consta de una placa mCore basada en Arduino UNO.Contiene dos sensores integrados en placa: sensor de luz y emisor-receptor de infrarrojos.Otros dispositivos también integrados en la placa son el zumbador y un led RGB.En el pack básico ofrece 2 tipos sensores externos que se conectan por cable: sensor de proximidad y sensor siguelíneas.En función de la versión del modelo dispondrá de un módulo bluetooth o de un módulo 2.4G para conectarse inalámbricamente con el ordenador.Este kit de robótica representa una opción muy recomendable para los centros educativos por sus interesantes prestaciones para trabajar la robótica educativa y por su adecuado precio.

Como funciona un puente para motores de corriente continua. En esta artículo veremos en modo detallado como funciona un puente de tipo "H", usado para controlar motores de corriente continua y de baja tensión.

Usaremos como ejemplo de referencia el circuito integrado L298, muy conocido en el ambiente de la robótica de pasatiempo. Puente H con interruptores En los motores de corriente continua, la dirección de giro de los mismos depende de la polaridad de la alimentación. Para poder cambiar dicha polaridad, sin necesidad de invertir la batería, se pueden usar 4 interruptores conectados como indicado en la figura. Este tipo de conexión se conoce como "Puente H" (por la forma del circuito que se asemeja a la letra "H") y posee propiedades muy interesantes que veremos a lo largo de este artículo.
Si por el contrario, activamos el interruptor alto de la derecha y el bajo de la izquierda, el motor quedará alimentado con el positivo a la derecha y el negativo a la izquierda, por lo tanto girará al contrario. Alimentar Arduino y robots compatibles con pilas o baterías. Guía definitiva. Alimentar Arduino con alternativas a una fuente de alimentación clásica se hace prácticamente necesario si nuestro proyecto es un robot que necesite autonomía de movimiento.
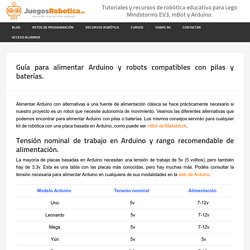
Veamos las diferentes alternativas que podemos encontrar para alimentar Arduino con pilas o baterías. Los mismos consejos servirán para cualquier kit de robótica con una placa basada en Arduino, como puede ser mBot de Makeblock. Tensión nominal de trabajo en Arduino y rango recomendable de alimentación. La mayoría de placas basadas en Arduino necesitan una tensión de trabajo de 5v (5 voltios), pero también hay de 3,3v. Esta es una tabla con las placas más conocidas, pero hay muchas más. Control PID de Barra y Bola con Arduino - Estudio Roble. Es fácil entender el Control PID estudiando un sistema Barra y Bola y utilizando como Controlador un Arduino.

El objetivo es situar la bola en el centro de la barra inclinándola de forma conveniente mediante un lazo cerrado de control. Vídeo Resumen de 5 minutos: Es un sistema clásico en la Ingeniería de Control. Mediante un Sensor de distancia, medimos la posición de la bola.Con un Controlador, mediante control PID, calculamos el ángulo en el que deberíamos inclinar la barra para colocar y estabilizar la bola en el centro de la barra.Un Actuador modifica la inclinación de la barra.
Sistema Barra y Bola. Conoce la interfaz de mBlock y programa los primeros pasos de tu mBot. – Programamos.